磁编码器系统精度误差
磁环编码器的测量精度受编码器本身精度误差和安装相关误差影响。评估总精度时需考虑各项主要误差,编码器系统误差包括:磁化误差、串扰和细分误差(SDE),安装误差。
下图为典型精度误差曲线,标注了各类误差的具体影响。
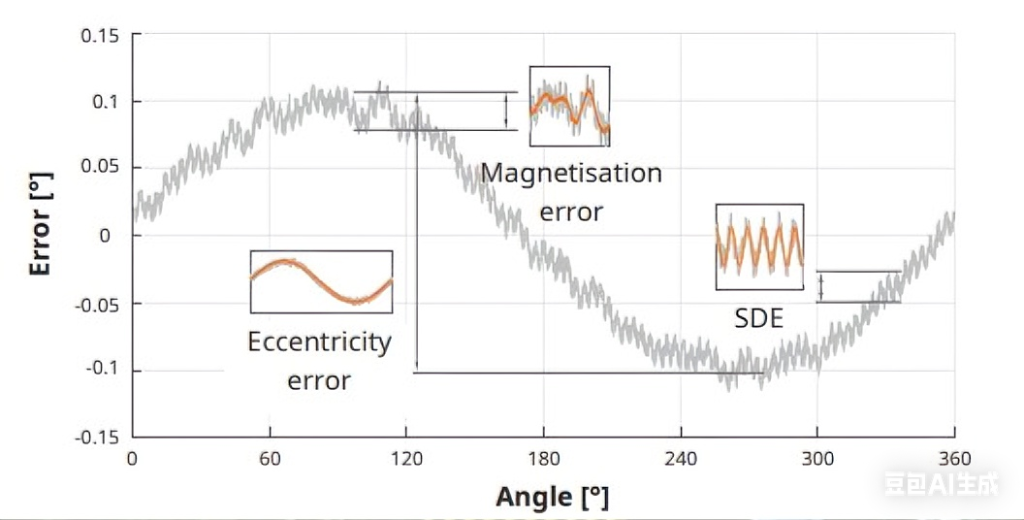
不同类型的误差会呈现出截然不同的波形特征:
| 误差类型 | 主要观察波形 | 关键频率/周期 | 波形特征 | 主要根源 |
|---|---|---|---|---|
| 细分误差 | 位置误差 | 高频,每个电气周期一次 | 在每个信号周期内波动的周期性误差 | 信号处理电路,插值算法 |
| 串扰 | Sin/Cos信号,李萨如图 | 贯穿始终 | 李萨如图形从圆形变为倾斜的椭圆 | 通道间电磁干扰,布线不当 |
| 磁化误差 | Sin/Cos信号,李萨如图 | 中频,每个电气周期一次 | 正弦波扭曲,李萨如图形为固定畸形 | 磁环本身质量或磁化工艺 |
| 安装误差 | 位置误差 | 低频,每转一次 | 以一转为一个周期的正弦波误差 | 机械安装偏心、不同心 |
具体分析几个误差的影响因素:
1.磁化误差
编码器磁环的磁化误差由弹性铁氧体材料的不均匀性和磁化过程中可能产生的偏差导致,不包括磁环安装偏心。影响因素包括:
- 铁氧体在弹性体材料中分布均匀性及饱和度
- 磁化过程中的磁环定位及充磁精度
- 制造过程中磁化系统的测量精度
2.串扰
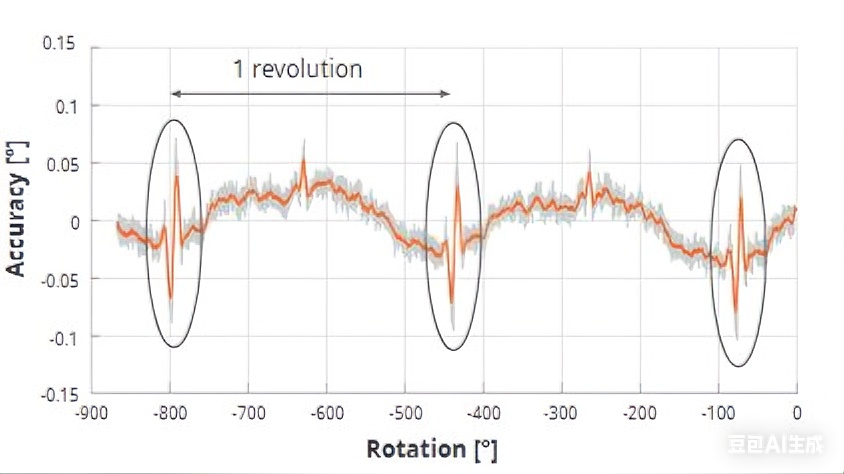
串扰是编码器磁环上的参考标记(reference mark)磁化对增量磁道磁化产生的不良影响,会导致精度峰值,受气隙高度和横向偏移影响,下图 为串扰示例。
串扰可以看作是给一个纯净的信号叠加了另一个信号的成分,这会在频谱上引入额外的谐波,导致信号波形失真。
3.SDE:细分误差或插值误差(单位:°)
细分误差是周期性精度误差,影响因素包括:磁极长度、磁极的均匀性和周期定义、读数头的安装感应距离(气隙)、信号处理质量、内部 AMR 传感器特性。在编码器用于速度反馈的应用中(如速度控制回路),细分误差会导致速度波动,且对径向磁环而言,细分误差受气隙高度影响显著。
SDE产生的因素包括:
- 信号不正交: 理想情况下,Sin和Cos信号应该相位相差 exactly 90度。如果不是,那么计算出的角度就会有偏差。
- 幅值不平衡: Sin和Cos信号的幅值(振幅)应该完全相同。如果一个是1.0V,另一个是1.1V,就会引入误差。
- 偏置误差(直流偏移): Sin和Cos信号的零点不准,即它们不是在0V上下对称波动,而是有一个直流偏移。
- 谐波失真: 理想的Sin/Cos信号是完美的正弦波。但实际上,它们可能包含高次谐波(形状不是完美的正弦波)。
由于这些非理想因素的存在,当编码器读数头从一个绝对位置点移动到下一个点时,通过插值计算出的微观位置与真实物理位置之间会存在一个微小的、周期性的偏差。这个偏差就是SDE。
4.安装相关误差
除编码器本身误差外,磁环和读数头的安装与调整通常对系统整体精度有显著影响,其中安装偏心和磁环安装过程中产生的变形尤为关键。
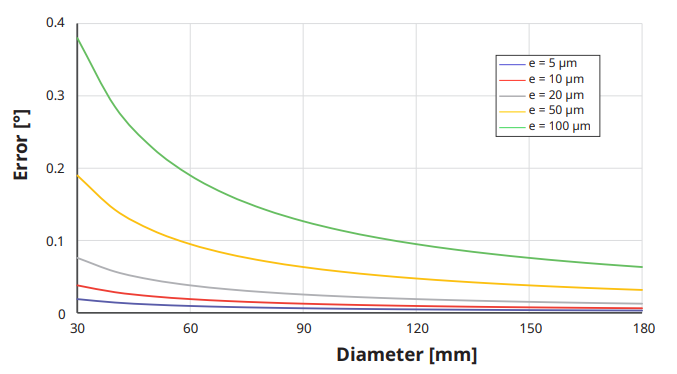
安装偏心
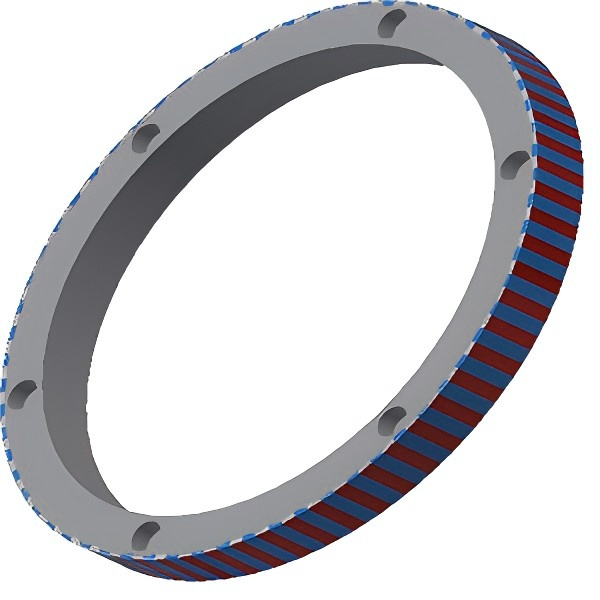
安装偏心由磁环中心与旋转轴对中偏差导致(下图 ),偏心误差可通过相应公式计算(e 为磁环中心与旋转轴的对中偏差,单位:微米;D 为磁环外径,单位:毫米)。
安装过程中的磁环变形
将磁环安装在非理想圆形轴上可能导致变形,进而严重影响系统精度。
欧波福对编码器磁环MR(Magnetic Ring)的精度控制
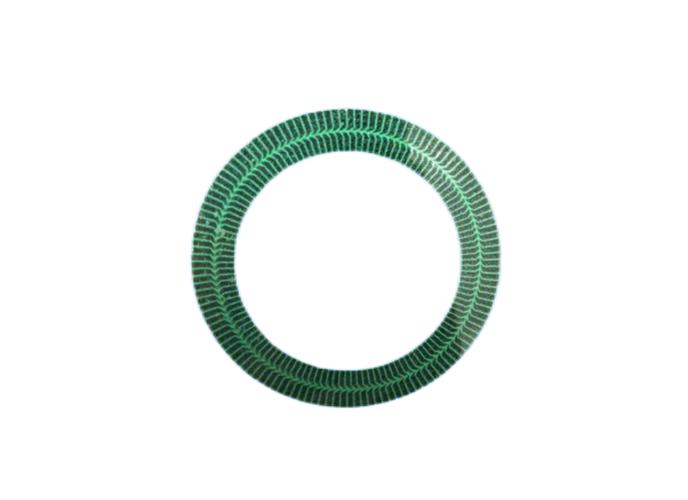
我们对磁环精度的控制贯穿于材料、粘接、磁化和检测全流程的整个闭环精密工程。我们的增量式磁环,绝对位置磁环, 精密磁栅等产品可以应用于机器人关节、云台定位、精密齿轮箱、医疗设备、无人机等高性能要求场景。
期待与您一起探讨精密磁环的应用,可以按需定制!