
在具身智能和机器人硬件加速迭代的今天,关节模组作为机器人的核心运动单元,其性能直接决定了整机的运动精度、响应速度与可靠性,成本占比可高达整机的60%。关节模组的进化速度,已成为推动人形机器人发展的关键因素。

直驱关节模组解析
1. 结构特点
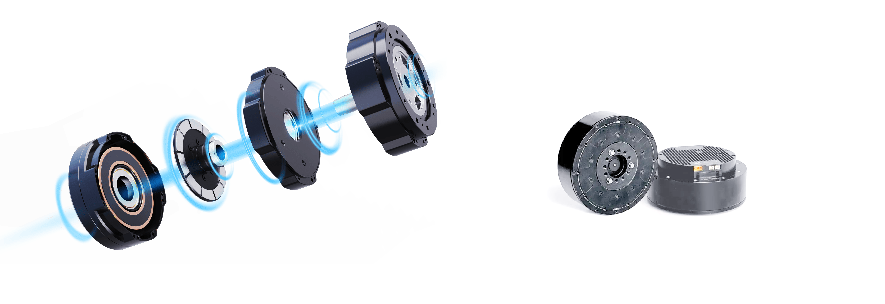
直驱关节模组采用高度集成化设计,省去了传统减速机构,将无框力矩电机、驱动器、编码器、制动器及力传感器深度融合。以某品牌RJS系列为例,电机与负载直连,结构紧凑,直径可控制在90mm以内,重量仅1.75kg,大幅减轻了关节重量。另一品牌RGM模组采用中空设计和L型外壳,既支持工具走线,又提升了协作机器人的空间利用率与安装便捷性。
2. 性能参数
直驱关节的核心优势在于高动态响应、超低噪声和无背隙传动。某品牌直驱电机齿槽转矩可低至1.2mNm(峰峰值),转矩常数达0.227Nm/A,实现了毫秒级响应。RGM14模组峰值扭矩达13.5Nm,额定转速35RPM,为10kg以下协作机器人提供了优异的位置精度。然而,直驱方案在扭矩密度上仍存在物理上限,例如泰科RJS14最大瞬时扭矩为54Nm,相较于减速器方案可达百Nm以上的输出仍显不足。
高精度位置反馈的关键作用
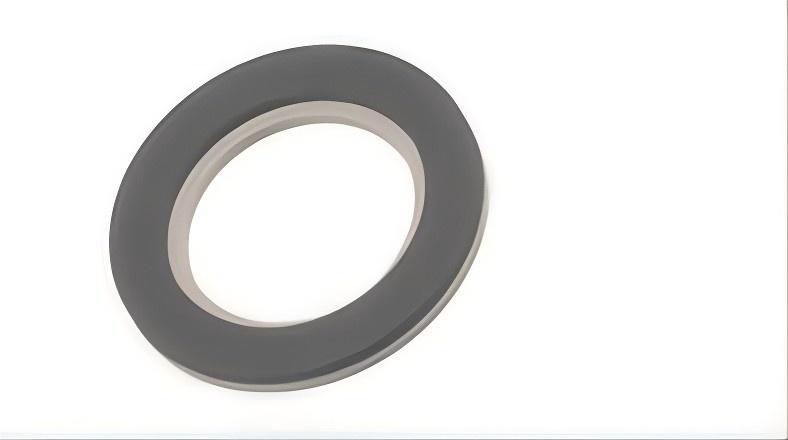
直驱方案对位置传感器(编码器)提出了极高要求。编码器需具备超高分辨率、多圈绝对位置反馈能力和优异的抗干扰性,以直接精确测量电机转子位置,实现无刷电机的精密换相和闭环控制,补偿由于省去减速器带来的扭矩不足时的位置精度维持。我们公司的高精度磁环编码器方案,凭借其优异的温度稳定性和抗外磁场干扰能力,可为直驱关节提供<0.01°的绝对位置测量精度,确保末端执行器的精确定位与运动平滑性。
带减速器关节模组

1. 减速器类型与性能差异
带减速器关节模组根据减速机构不同,主要分为三大技术路线:
- 谐波减速器:以其轻量化和高精度(背隙<1弧分)著称,但柔轮结构在高冲击负载下存在断裂风险。
- 行星减速器:具有成本低、抗冲击性强(如采用0.65大模数齿轮)的优点,但背隙通常较大(>10弧分)。
- 摆线/准双曲面减速器:融合了高精度(背隙可达1弧分)与大扭矩输出(如PhyArc150峰值扭矩达530N·m)的优势,抗冲击性较谐波方案显著提升。
2. 结构创新与编码器要求
新一代减速器模组通过机电深度融合实现性能突破。某品牌在准直驱关节中融合自研电机驱动器和电源管理系统,实现了百兆级通信带宽与1kHz实时控制环路。
另一品牌P1010A则通过“齿轮-钢套-销钉”组合设计,有效解决了行星架构中的齿轮打滑问题,使寿命延长2倍以上。
对于带减速器的关节,磁编码器同样至关重要。它通常被安装在电机端,用于测量高速侧转子的位置和转速。经过减速器放大后,低速端微小的角度偏差都会被放大,因此要求电机端编码器具备极高的单圈分辨率(17-20bit)和低速稳定性,以实现对输出端位置的精确解算和控制。
我们欧波福公司的高精度磁环,充磁精度高,结构稳定,从而提供稳定可靠的位置反馈,是提升关节模组整体控制精度的重要保障。
应用场景分化
- 直驱方案:主要应用于医疗机器人、实验室精密定位台等对清洁度、静音运行和绝对无背隙有严苛要求的低负载、高精度场景。
- 减速器方案:凭借其高扭矩密度和高抗冲击性,成为人形机器人关节、工业重载机械臂等高动态、高负载应用场景的首选。
关节模组性能标杆产品解析
- 某品牌P1010A行星关节模组:峰值扭矩120N·m,转矩系数2.5N·m/A(超行业均值19%)。其10:1减速比结合宽电压(18-60V)设计,完美适配足式机器人的跳跃跌落等高冲击场景。
- 某品牌PhyArc102摆线关节:扭矩密度高达200N·m/kg,重量仅1kg,专为追求极致轻量化的人形机器人设计。
- 某品牌RJS14谐波集成模组:以其超低功耗(20W)和支持EtherCAT/CANopen总线通信的特性,成为教育科研领域的爆款产品。
- 某品牌准双曲面模组HYP-6C:其中空孔径达57mm,极大拓展了机械臂的臂展能力和内部走线空间,在焊接等应用中使灵活性提升40%。
技术趋势
未来,关节模组的发展将呈现两大趋势:机电深度融合与仿真驱动设计。通过多物理场仿真数据持续优化电磁与机械结构,打造性能与成本最优的解决方案。
随着人形机器人迈向大规模量产,高性价比的减速器方案(行星与谐波)将主导工业应用场景;而直驱与准直驱方案凭借其无可替代的精密特性,将在医疗、实验室等高端精密领域持续发展。高精度、高可靠性的位置传感技术,作为实现这一切的基础,将愈发受到重视。